- 3D-objektgjenkjenning
- O3R Robotics Platform
O3R Perception Platform
Persepsjonsplattformen med et blikk
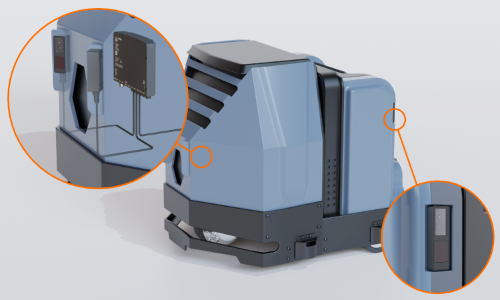
O3R persepsjonsplattformen er en multisensor- og kameragateway i forbrukerproduktstørrelse og kostnadsstruktur – med industriprodukters langsiktige tilgjengelighet og robusthet. Opptil seks kamerahoder kan kobles til den sentrale prosessorenheten via FPD-koblingen. Ytterligere sensorer som radar eller lidar kan kobles til via et Gigabit Ethernet-grensesnitt. På grunn av den fleksible monteringsposisjonen og arrangementet kan varierende forskjellige områder skannes, og for eksempel kan kollisjoner med hindringer som stikker ut i kjørebanen over synsfeltet til sikkerhetsskanneren forhindres.
Den avgjørende, sentrale enheten til kantberegning tilbyr nok plass til å kjøre algoritmene dine eller til å bruke ferdige funksjoner som kollisjonsunngåelse eller palldeteksjon.
Høyeste grad av automatisering i bilindustrien
Autonomous Vehicle (AV)-industrien jakter på nivå 5 autonomi, full automatisering der ingen interaksjon fra sjåføren er nødvendig, slik at en generell forbruker kan kjøpe en AV.
- Produsenter anerkjenner at nivå 5 bare kan oppnås med en persepsjonsstabel som lar kjøretøyet oppfatte miljøet bedre.
- Multimodal tilnærming for persepsjon rundt kjøretøyet.
- Hver modalitet er designet for å overvinne "svakheten" til en annen modalitet, og skaper en robust plattform for klassens beste miljøbevissthet.
Utfordringer innen mobil robotikk
Autonomi er ikke nytt for Mobile Robotics (først introdusert på 1950-tallet).
- I motsetning til AV-industrien, er kostnadspunkter en barriere for å ta i bruk mobile roboter.
- Inngangspunkter for mobile roboter krever en betydelig investering fra brukeren, noe som øker tiden for å oppnå en sterk avkastning.
- Produsenter må gå på akkord med valg av maskinvare, primært med fokus på sikkerhet, for å redusere BoM-kostnadene.
- Til syvende og sist begrenser dette robotens generelle fleksibilitet, noe som igjen reduserer dens kapasitet.
Hva om du ikke måtte inngå kompromisser?
Ta en side fra AV "boken"
AV-industrien tar ikke feil i sin tilnærming til å nå nivå 5 autonomi.Bedre miljøbevissthet fører til mer fleksibilitet og bedre total drift av en AV.Den samme muligheten bør eksistere for den mobile robotindustrien.
For at dette skal bli en realitet, må utfordringer i multimodale, multikameraapplikasjoner, inkludert sensorsynkronisering og fusjon, reduseres.Den eneste måten å redusere de totale eierkostnadene for persepsjonsplattformer er å forenkle design og integrasjon av multimodale systemer.
O3R persepsjonsplattformen ble designet for å oppfylle denne oppgaven.
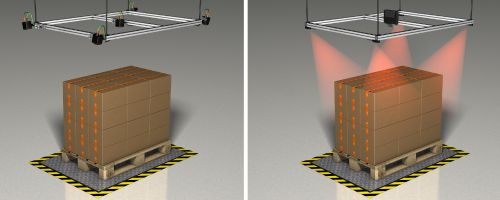
O3R-plattformen er den omfattende løsningen for sentralisert, synkronisert behandling av bilde- og sensorinformasjon i autonome mobile roboter, som AGV-er. Den forenklede integrasjonen og pålitelige interaksjonen mellom kameraer og sensorer muliggjør robust implementering av relevante funksjoner som kollisjonsunngåelse, navigasjon og posisjonering. I tillegg kan analyse og dimensjonering av stasjonære objekter implementeres og håndteres mer effektivt ved hjelp av flere kameraer. Eksempler inkluderer måling av paller, stokker, pakker eller kofferter.
Kamerahode med imager utviklet internt

ifm tilbyr egnede kamerahoder med høy ytelse som en del av plattformløsningen: 2D/3D-kameraene har en valgfri blendervinkel på 60° eller 105° og er utstyrt med det siste tidsavbruddslyset fra pmdtechnologies ag. Dette selskapet i ifm-gruppen av selskaper utvikler alle sensorer for synsproduktene til automasjonsspesialisten og tilpasser dem nøyaktig til de respektive kravene. Takket være det modulerte infrarøde lyset, oppdager 2D/3D-kameraet objekter med maksimal pålitelighet selv med økt eksponering for omgivelseslys.
Kraftig og åpen: den sentrale enheten for sensorisk prosessering

Systemets kjerne er en kraftig dataenhet kalt Video Processing Unit (VPU). Den er basert på Yocto Linux og NVIDIA Jetson TX2 og støtter åpne utviklingsmiljøer som ROS og Docker. Opptil seks kamerahoder kan kobles til dataenheten. Ytterligere sensorer, som ultralydsensorer for å oppdage glassoverflater som dører eller skillevegger, kan kobles til via et Gigabit Ethernet-grensesnitt. Alle relevante "sanser" som en AGV trenger for sikker autonom navigering er dermed tilgjengelig på et sentralt punkt.
O3R-programvarearkitekturen letter forhåndsutvikling og serieutvikling gjennom et rikt utvalg av programvareverktøy og støtte fra en rekke grensesnitt. Åpne utviklingsmiljøer som Python, ROS, CUDA og C++ støttes ved hjelp av en Docker-arkitektur.
| Linux er det mest brukte operativsystemet innen robotikk.Hjelpeenheter må snakke samme språk. | |
| Containere tillater utviklerens komplette fleksibilitet i programmeringsspråk og miljø. Utviklingstiden reduseres ved bruk av et kjent programvaremiljø. | |
 |
ROS er en standard mellomvare som brukes i utvikling.ROS2 gir potensialet til å gå fra utvikling til distribusjon. |
| Kraftige verktøy som CUDA og Jetpack er fullt ut distribuerbare på den NVIDIA-baserte VPUen. |


 OVP810")
 OVP811")